Project Overview
The Follow-Line-Simulator is an innovative project that combines robotics simulation with deep learning to create an intelligent line-following system. Built using Processing 4, this simulator provides a virtual environment where Recurrent Neural Networks (RNN) can learn to navigate complex paths autonomously.
The project demonstrates the power of neural networks in solving real-world robotics problems. The simulator creates a 2D environment with various track layouts, obstacles, and challenges that the AI agent must navigate. The RNN learns to process visual input and make real-time decisions to follow the line while avoiding obstacles.
This project serves as an excellent educational tool for understanding neural networks, reinforcement learning, and computer vision concepts. It's particularly useful for students and researchers interested in autonomous navigation and AI applications in robotics.
Key Features:
- Interactive 2D simulation environment
- RNN-powered autonomous navigation
- Multiple track layouts and difficulty levels
- Real-time visual feedback and learning
- Educational visualization of neural network decisions
- Customizable simulation parameters
Demo:
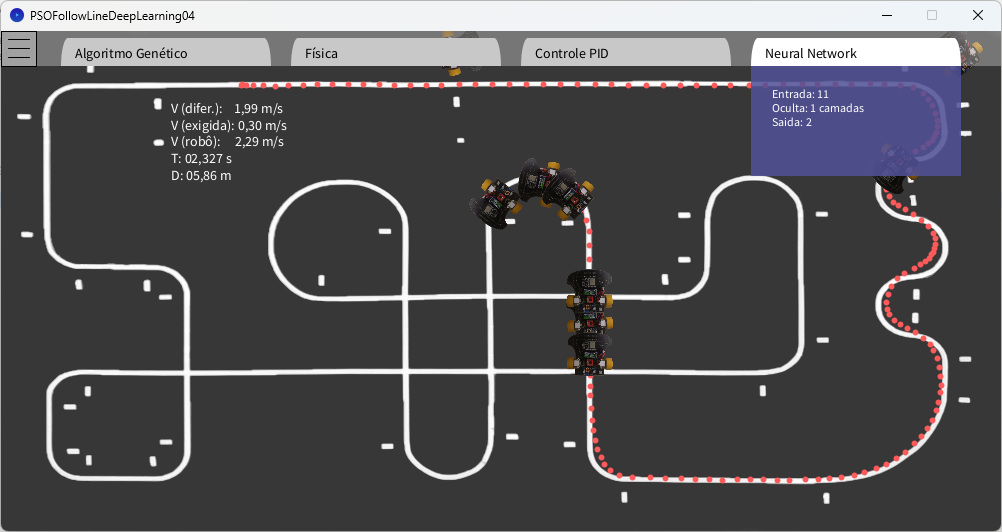
PSO optimization enabling RNN-powered line following behavior in the simulator